


|
中國海洋大學(xué)
 搜 索
搜 索
搜 索
搜 索


項(xiàng)目成果/簡介:
經(jīng)過多年的努力,國內(nèi)AUV研究已取得長足進(jìn)展,然而仍存在可靠性差、智能水平低等問題,難以應(yīng)對復(fù)雜海底環(huán)境,不能滿足我們對高效率作業(yè)和長期自主性的迫切需求。為解決上述關(guān)鍵問題,中國海洋大學(xué)致力于研發(fā)面向長航程深海觀測任務(wù)的具有數(shù)據(jù)驅(qū)動能力的新一代AUV系統(tǒng)。在結(jié)合自主導(dǎo)航系統(tǒng)精確定位與高性能的運(yùn)動控制基礎(chǔ)上,根據(jù)AUV調(diào)查任務(wù)需求,通過對海量高維觀測數(shù)據(jù)的關(guān)鍵特征實(shí)行快速分析,賦予AUV系統(tǒng)對航行路徑的智能決策能力,極大提升了海洋調(diào)查任務(wù)實(shí)施的質(zhì)量與效率。
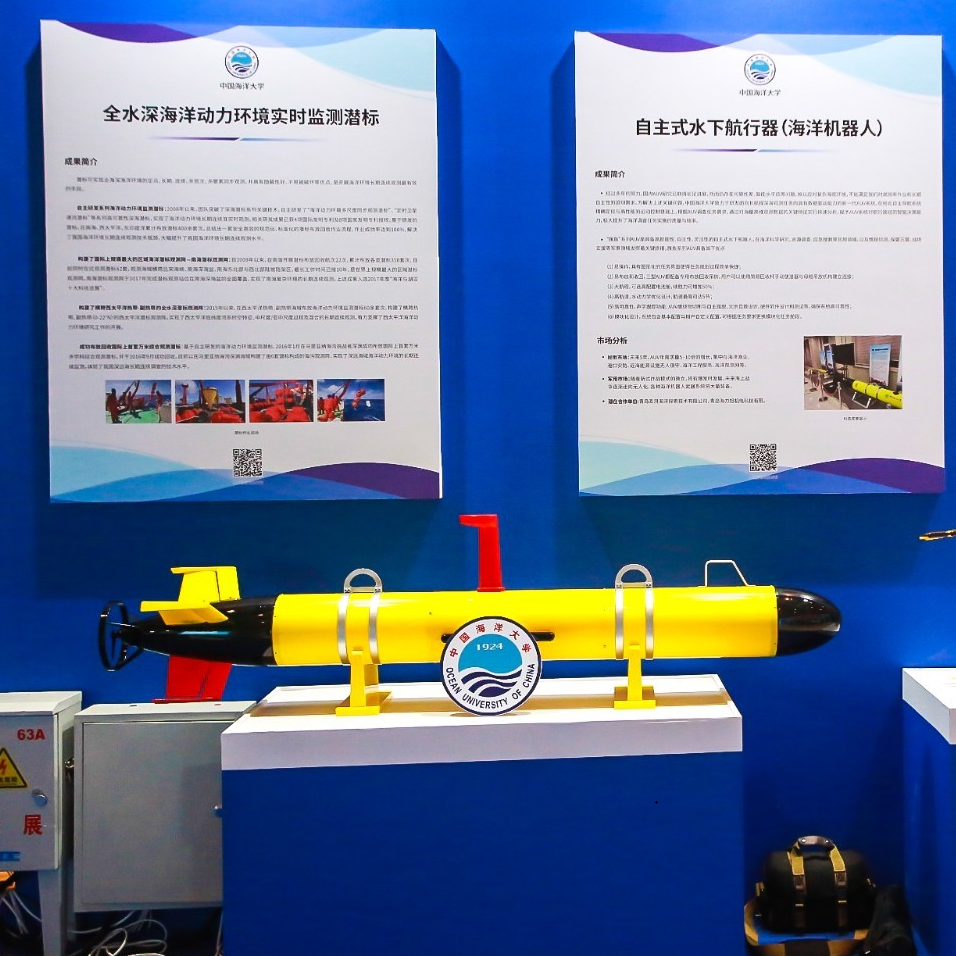
“旗魚”系列AUV是具備高智能性、自主性、靈活性的自主式水下機(jī)器人,在海洋科學(xué)研究、資源調(diào)查、應(yīng)急搜救等民用領(lǐng)域,以及情報(bào)偵測、探雷滅雷、戰(zhàn)場支援等軍事領(lǐng)域發(fā)揮著關(guān)鍵作用。旗魚系列AUV具備如下優(yōu)點(diǎn):
(1)易操作,具有圖形化的任務(wù)界面使得任務(wù)規(guī)劃過程簡單快捷;
(2)易布放和收回,三型AUV都配備專用布放回收吊鉤,用戶可以使用簡易回收桿手動使?jié)撈髋c母船吊放機(jī)構(gòu)建立連接;
(3)大航程,可選高配置電池艙,續(xù)航力可增加50%;
(4)高航速,水動力學(xué)優(yōu)化設(shè)計(jì),航速最高可達(dá)5節(jié);
(5)高可靠性,聲學(xué)跟蹤功能、AUV纏繞物切斷與自主擺脫、冗余自救設(shè)計(jì)、硬件軟件設(shè)計(jì)和測試等,確保系統(tǒng)高可靠性;
(6)模塊化設(shè)計(jì),系統(tǒng)包含基本配置與用戶自定義配置,可根據(jù)任務(wù)要求更換模塊化任務(wù)艙段。
項(xiàng)目階段:
小試、中試階段
效益分析:
知識產(chǎn)權(quán)類型:
發(fā)明專利 、 軟件著作權(quán)
知識產(chǎn)權(quán)編號:
ZL200810237864.X 201510789501.7
技術(shù)成熟度:
通過中試
技術(shù)先進(jìn)程度:
達(dá)到國內(nèi)領(lǐng)先水平
成果獲得方式:
獨(dú)立研究
獲得政府支持情況:
無

掃碼關(guān)注,查看更多科技成果

