





- 60 高校采購信息
- 118 科技成果項目
- 0 創新創業項目
- 0 高校項目需求
無刷雙饋風力發電系統抗擾動控制研究


該成果主要聚焦無刷雙饋電機在海上風力發電中的高性能抗擾動控制,包括抗內擾和抗外擾運行,主要包含三部分的內容,分別是參數魯棒控制、無位置傳感器控制和非理想電網下的控制,如圖 1 所示。

圖 1:成果內容介紹
首先所提方法對電機參數變化具有較強的魯棒性,在電機參數發生變化的情況下仍能保持良好的控制效果。實驗中的測試結果如圖 2 所示。傳統方法在互感參數變化時,有功無功均會出現不同程度的跟蹤誤差,而且控制繞組電流的幅值也會相應變化;而所提方法能夠一直保持無差跟蹤,控制效果基本不受互感參數變化的影響。
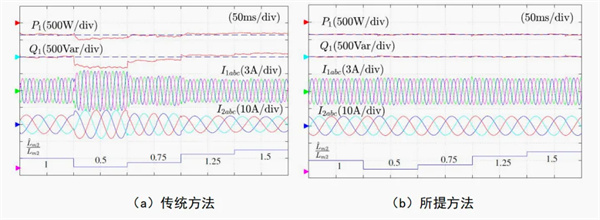
圖 2:電機互感參數不匹配時不同控制方法的實驗結果
其次,所提方法不需要位置傳感器提供的轉速和位置信息,通過調整參考模型和可調模型之間的誤差來估計電機實時的轉速和位置,其在升速過程中的實驗結果如圖 3 所示。當轉速發生變化時,所提方法的功率跟蹤效果不受影響,功率繞組電流畸變率無明顯變化;估計的轉速能夠快速準確跟蹤實際值,位置誤差維持在固定范圍內,不受轉速變化而變化。
最后,在非理想電網下,所提方法能夠根據不同的需求實現不同的控制目標,并且能夠保持較強的參數魯棒性。以其中一個控制目標(控制繞組電流正弦對稱)為例,電網電壓同時出現畸變和不平衡,實驗結果如圖 4 所示,可以看出傳統方法在非理想電網下功率繞組電流和控制繞組電流均會出現嚴重的畸變,影響發電質量;而所提方法能夠較好實現控制目標,功率繞組電流諧波也有明顯減少,顯著提高了控制效果。

圖 3:所提無位置方法在轉速變化下的實驗結果

圖 4:畸變且不平衡電網條件下不同控制方法的實驗結果

圖 5:級聯式無刷雙饋機組

圖 6:風力發電實驗平臺
創新點
1、提出了魯棒預測控制方法,其在穩態和動態性能上都有良好的表現。改變控制器中的電機參數時,控制效果不受影響;而改變實際的電機參數時,功率在出現跟蹤誤差后能快速消除靜差。
2、改進了基于控制側電流的模型參考自適應無位置控制方法。改進后的方法計算簡單,估計的信息仍有很高的準確度。將其與所提魯棒預測控制相結合后,在電機參數變化的情況下,仍可以實現快速無差的功率跟蹤。
3、研究了畸變電網下的控制方法,降低了位置觀測中的波動,當電機參數變化時,所提方法不僅能分別實現四種控制目標,也能有效抑制電機參數變化的擾動,實現非理想電網下對無刷雙饋電機的無位置魯棒預測控制。
該項成果主要作為電動機應用于變頻調速領域,以及作為發電機應用于變速恒頻領域。具體應用場景包括海上風力發電、水力發電機、船舶軸帶發電和抽水蓄能電機等。
本項目的成功實施將為風力發電系統領域提供一種可靠性高、魯棒性強、維修成本低、動靜態性能優異、參數整定容易并且適應非理想電網運行的新型風力發電裝置。研究成果將彌補和完善無刷雙饋電機系統的理論研究體系,提高其實用性和可靠性,加快基于無刷雙饋電機的海上風力發電系統的產業化步伐,對基于無刷雙饋電機系統的變頻調速、獨立負載發電等應用也具有重要的借鑒意義。

掃碼關注,查看更多科技成果