高等教育領域數字化綜合服務平臺






聊城大學
山東省
- 0 高校采購信息
- 29 科技成果項目
- 0 創新創業項目
- 0 高校項目需求
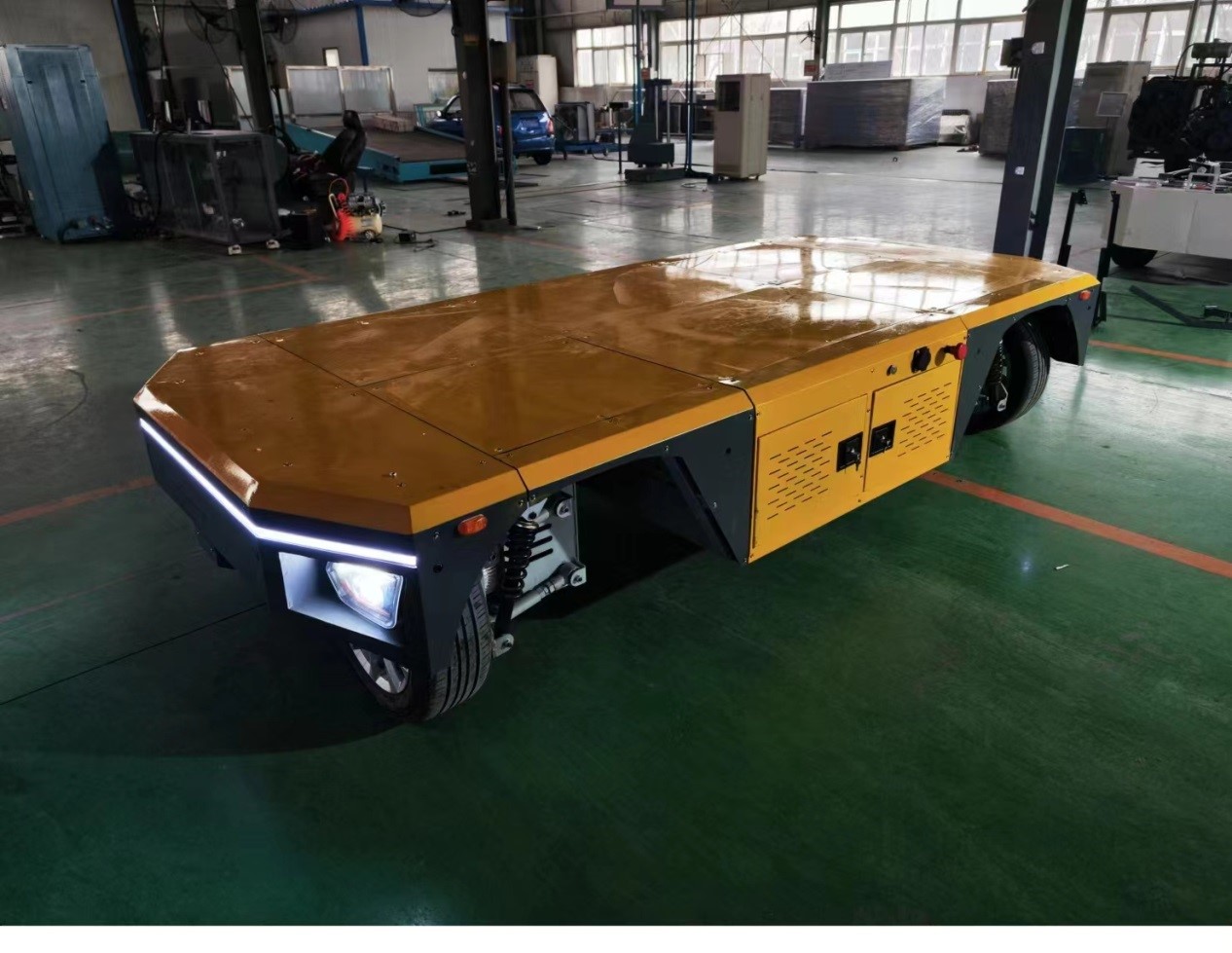
車規級全向、全環境線控底盤


所屬領域:
項目成果/簡介:
團隊基于集中式驅動,四輪轉向的設計理念,突破了低底盤高度前后獨立懸架技術壁壘,完成了從0.5噸-3噸級線控底盤的系列化開發。相對現有輪轂電機驅動的線控底盤,產品可在保證相同駕駛功能的前提下,成本降低2萬元左右/臺。
團隊采用整體橋構型,突破了“蹺蹺板”機構的技術壁壘,完成了6噸-20噸級AGV系列化產品開發。與市場同類產品對比,產品具有轉向半徑小,成本較低和可靠性高的特點。
針對當前線控底盤難以兼顧全向、全地形和不同承載需求的痛點問題,團隊開發了適用不同承載需求的全向、全環境線控底盤。技術特點為:① 采用轉向、驅動和制動模塊化設計理念,通過加裝車規級行車和駐車制動器,整車可實現直行、斜行、阿克曼轉向、坦克調頭、定點調頭等模式;② 采用輪邊電機驅動,突破了電機+減速機+輪轂軸承單元一體化驅動技術,并基于正向設計理念,實現模塊化設計。當前已開發完成8款適用不同承載需求的角單元;③ 突破了滿足遙控和自動駕駛功能的整車電控技術,并基于V型開發流程完成了全向、全矢量線控底盤的系列化產品開發。
部分產品如下頁圖示:


知識產權類型:
技術成熟度:

掃碼關注,查看更多科技成果
取消
確定