





- 2 高校采購信息
- 7 科技成果項目
- 0 創新創業項目
- 0 高校項目需求
計算機學院(軟件學院·人工智能學院)物聯網團隊在多智能體協同智能感知方向取得新進展


計算機學院(軟件學院·人工智能學院)物聯網團隊由黃寶琦教授、賈冰副教授、郝利飛研究員等教師和50余名研究生組成。團隊入選自治區高等學校創新團隊發展計劃,專注于物聯網智能感知、無線網絡定位、生態大數據等領域的研究和應用。近期,物聯網團隊在無人機、機器人等多智能體協同智能感知方向取得了重要研究進展,3項研究成果發表在領域頂級期刊上。以下為成果簡述:
1.在多智能體多模態融合感知方面,在中國計算機協會(CCF)推薦A類期刊IEEE Transactions on Mobile Computing上發表了題為“Heterogeneous Dual-Attentional Network for WiFi and Video-Fused Multi-modal Crowd Counting”的學術論文(論文鏈接:https://ieeexplore.ieee.org/document/10637758)。
為克服無線或視覺感知智能體捕獲單模態信息存在的固有局限,如無線信號的隨機性和稀疏性、視覺信號的視野局部性和易受干擾性,課題組提出一種創新的基于多模態深度學習的異構雙注意力網絡(HDANet)模型,利用大量的WiFi嗅探器和少量的攝像頭構建多智能體多模態感知網絡,通過聯合建模全局無線感知與少量局部視頻感知的模態內和模態間相關性,實現了精準和穩定的大范圍人群分析,并在覆蓋面積超1萬平米的真實校園環境中驗證了其優越的人群分析準確性和穩定性。
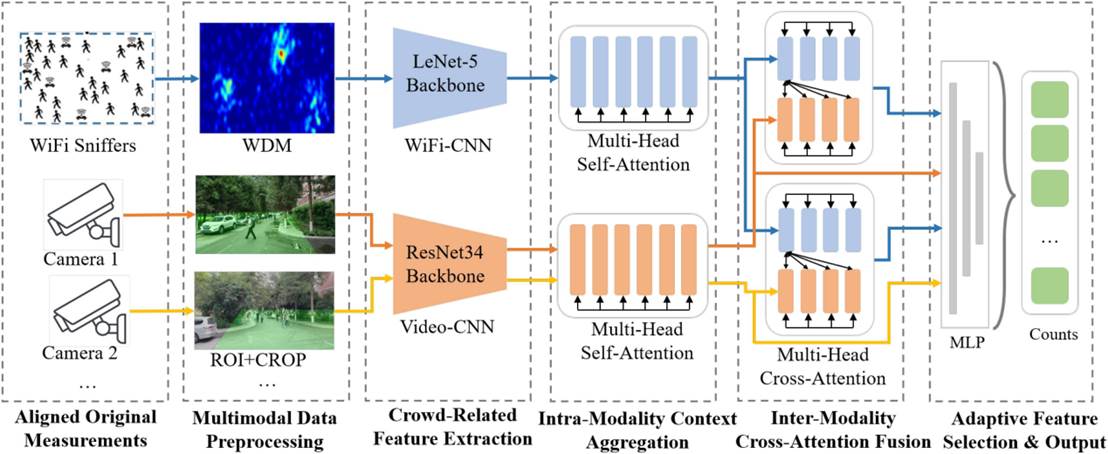
圖1 異構雙注意力網絡模型(HDANet)整體流程圖
該成果由我校與西安電子科技大學毛國強教授課題組合作完成。黃寶琦教授為通訊作者,郝利飛研究員為第一作者,賈冰副教授為第三作者,內蒙古大學為第一完成單位。該研究受到國家自然科學基金、自治區自然科學基金、自治區高等學校創新團隊發展計劃等項目支持。
2.在多無人機協同感知方面,在CCF推薦A類期刊IEEE Transactions on Mobile Computing上發表題為“Energy-Efficient 3-D UAV Ground Node Accessing Using the Minimum Number of UAVs”(論文鏈接:https://ieeexplore.ieee.org/document/10539333)。
多無人機協同感知已廣泛應用于數據收集、環境監測等領域,如何減少特定任務執行時的無人機數量和能耗是其中的關鍵問題。現有研究多集中于二維場景、假設無人機數量固定且場景特定,導致通用性不足。對于三維場景下多無人機訪問多個地面節點的任務,課題組將其建模為最少數量智能體高能效多目標訪問問題,并進一步分解為兩個子問題:(1)利用凸優化和路徑離散化技術使單個無人機連續訪問任意兩個目標節點的能耗最小;(2)利用基于改進粒子群優化和貪心路徑分配的近似框架(MPSO-GPA)實現最少數量無人機情況下的高能效路徑規劃。

圖2 最少數量智能體高能效多目標訪問的優化問題及決策變量示意圖
該成果由我校獨立完成。黃寶琦教授為通訊作者,所指導的2020級博士研究生弓浩為第一作者,賈冰副教授為第三作者,內蒙古大學為第一完成單位。該研究受到國家自然科學基金、自治區自然科學基金、自治區高等學校創新團隊發展計劃等項目支持。
(3)在機器人視覺感知優化方面,在中科院SCI一區TOP期刊IEEE Transactions on Intelligent Transportation Systems上發表題為“MAS-DSO: Advancing Direct Sparse Odometry With Multi-Attention Saliency”的學術論文(論文鏈接:https://ieeexplore.ieee.org/document/10570369)。
視覺里程計(Visual Odometry, VO)是同時定位與建圖(Simultaneous Localization And Mapping, SLAM)的重要分支,已被廣泛應用于無人機、機器人導航等領域。然而,由于現有視覺里程計的特征選擇能力有限、圖像結構理解能力不足,導致其在動態紋理、光照不足和快速旋轉運動等復雜環境中的表現較差。為此,課題組提出一種新型視覺里程計框架,即多注意力顯著性直接稀疏里程計(MAS-DSO),通過對視覺顯著區域的精準識別和圖像結構的深入理解,顯著增強了視覺里程計的性能和魯棒性。同時,提出的MAS-DSO還能夠提高特征選擇效率和增強復雜環境中多元化圖像的處理能力。
圖3 多注意力顯著性直接稀疏里程計(MAS-DSO)架構圖
該成果由我校獨立完成。黃寶琦教授為通訊作者,所指導的2021級博士研究生李祥宇為第一作者,賈冰副教授為第三作者,內蒙古大學為第一完成單位。該研究受到國家自然科學基金、自治區科技計劃、自治區高等學校創新團隊發展計劃等項目支持。

掃碼關注,查看更多科技成果