


|
中南大學(xué)
 搜 索
搜 索
搜 索
搜 索


針對(duì)礦井惡劣環(huán)境中絕對(duì)定位信息缺失,利用多源融合感知技術(shù),構(gòu)建可行駛區(qū)域兩側(cè)邊緣,利用中心參考軌跡種子點(diǎn)生成擬合跟蹤軌跡。建立勢(shì)場態(tài)勢(shì)圖,實(shí)現(xiàn)智能礦用掘進(jìn)機(jī)井下動(dòng)態(tài)避障,并設(shè)計(jì)了自適應(yīng)變參數(shù)的軌跡跟蹤導(dǎo)航控制方法,突破了智能礦用掘進(jìn)機(jī)礦井下自主導(dǎo)航規(guī)劃的技術(shù)瓶頸。
提供了一種礦井下智能駕駛的局部路徑規(guī)劃方法及系統(tǒng),自適應(yīng)調(diào)整軌跡,實(shí)現(xiàn)路口前礦車的橫向校正,保證礦車安全的通過路口,提高下無人礦車在分岔路口的安全性;提供了一種智能掘進(jìn)機(jī)橫向優(yōu)化控制方法及系統(tǒng),在粉塵碎石惡劣環(huán)境下,并缺乏絕對(duì)定位信息時(shí),實(shí)現(xiàn)智能礦用掘進(jìn)機(jī)井下精確橫向軌跡跟蹤控制技術(shù);提供了一種智能駕駛的自底向上平滑軌跡生成方法及系統(tǒng),保證在直線路線參考點(diǎn)處于道路中間,在彎道路段參考點(diǎn)處于彎道內(nèi)側(cè),提高掘進(jìn)機(jī)行駛過程中的安全性。
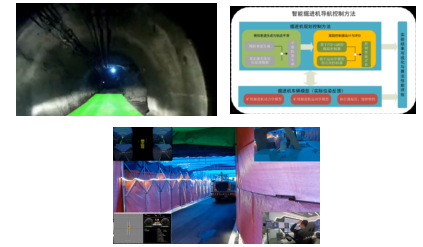
智能礦用掘進(jìn)機(jī)井下導(dǎo)航控制技術(shù)
成果在礦下掘進(jìn)機(jī)的智能駕駛中得到廣泛應(yīng)用,特別是智能網(wǎng)聯(lián)礦用汽車的自主導(dǎo)航過程中,如井下定位、融合建圖、路徑規(guī)劃、軌跡跟蹤控制方面等。成果可為智慧礦山的減人化或無人化提供技術(shù)支持。同時(shí)可改善礦業(yè)工人作業(yè)環(huán)境,提高安全系數(shù)。
產(chǎn)業(yè)化

掃碼關(guān)注,查看更多科技成果

