





- 74 高校采購信息
- 3295 科技成果項目
- 0 創新創業項目
- 0 高校項目需求
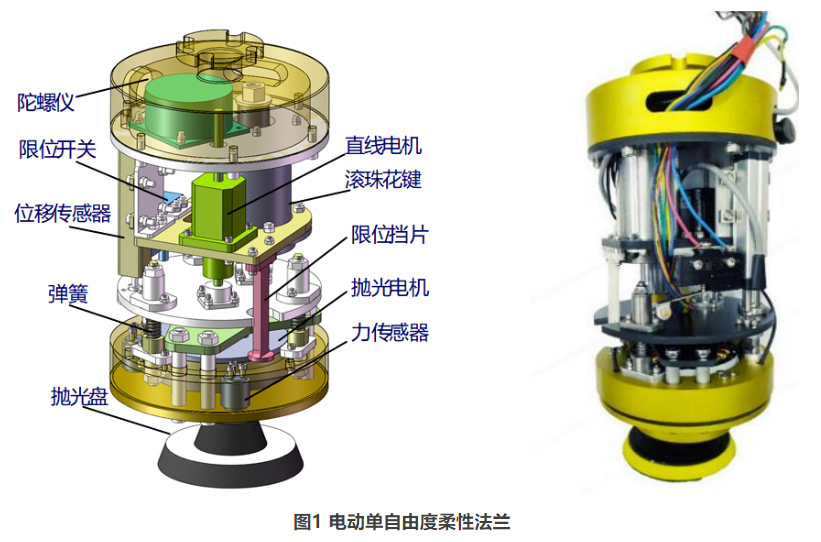
大型風電葉片磨拋移動式加工機器人系統


本成果提出了一種新型的移動式磨拋加工機器人方案,實現了具有高轉動輸出特性的并聯機構構型創新設計與尺寸參數優化,建立了機器人整機高剛度高能效設計方法,開發了高能量密度關鍵驅動單元,搭建了開放式機器人控制系統并研制了移動式混聯磨拋機器人系統樣機,攻克了機器人精度保證難題并實現了末端執行器的準確定位。
項目研究了曲面自適應的主被動耦合柔性磨拋法蘭,建立材料去除模型以研究進給速度與接觸力同步耦合規劃方法、開發了面向大型風電葉片磨拋加工余量檢測的原位視覺測量系統,進行了面向大型風電葉片磨拋的原位視覺測量-余量補償-力控加工的自適應打磨與驗證,為大型風電葉片力控磨拋工藝系統設計提供了理論基礎和實現手段。
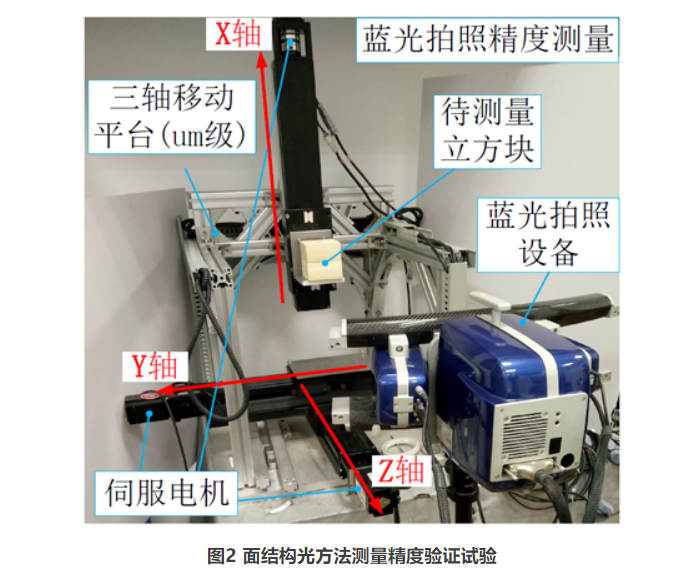
并且項目研制基于玻璃鋼葉片高光反射表面三維激光掃描測頭,構建了面向超大葉片的多移動機器人協作型激光三維測量系統,并完成了大型風電葉片測量軟件的開發,實現風電葉片高精度定位以及健壯、高效高精的多機器人協作測量與葉型分析。

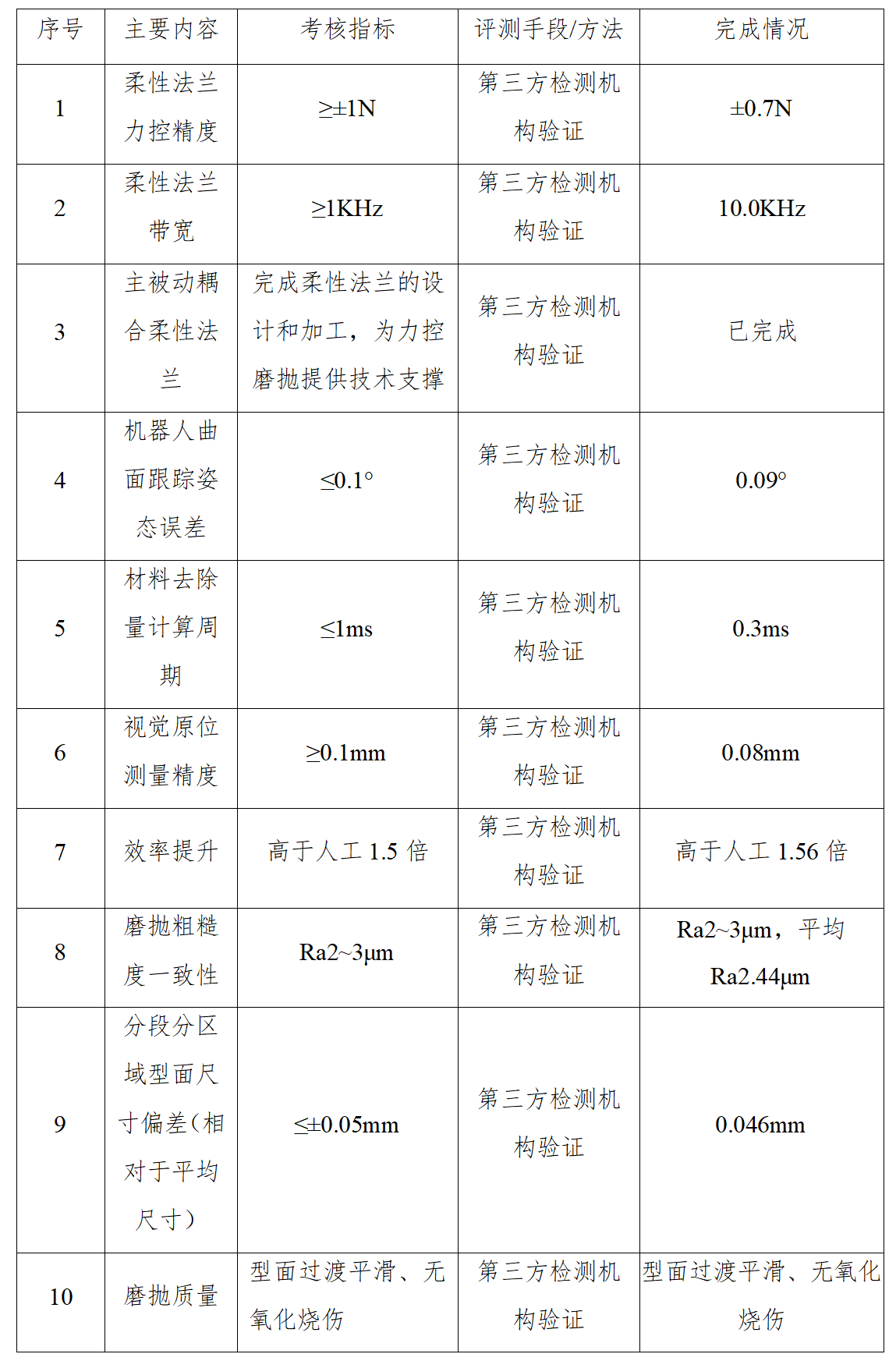
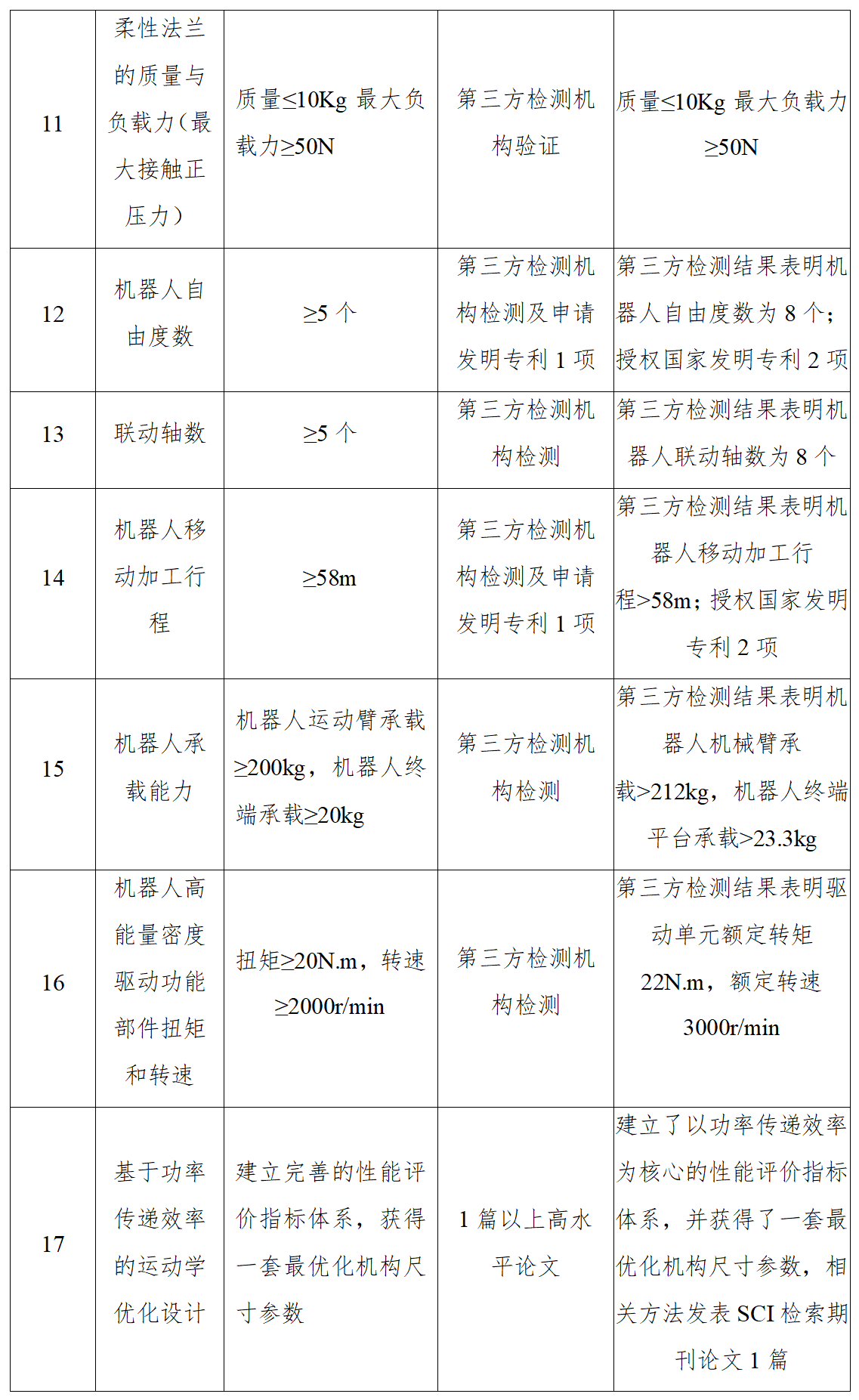
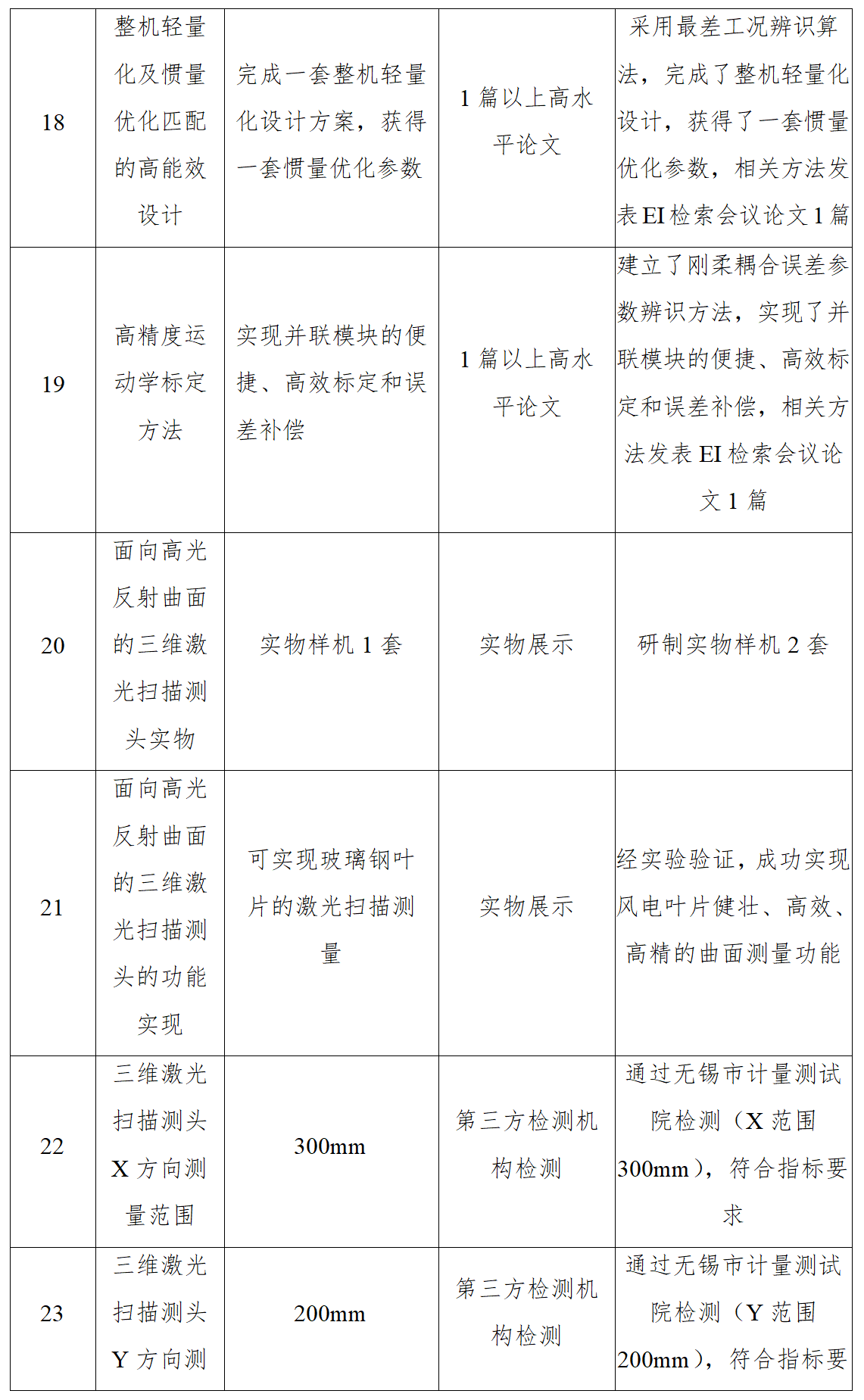
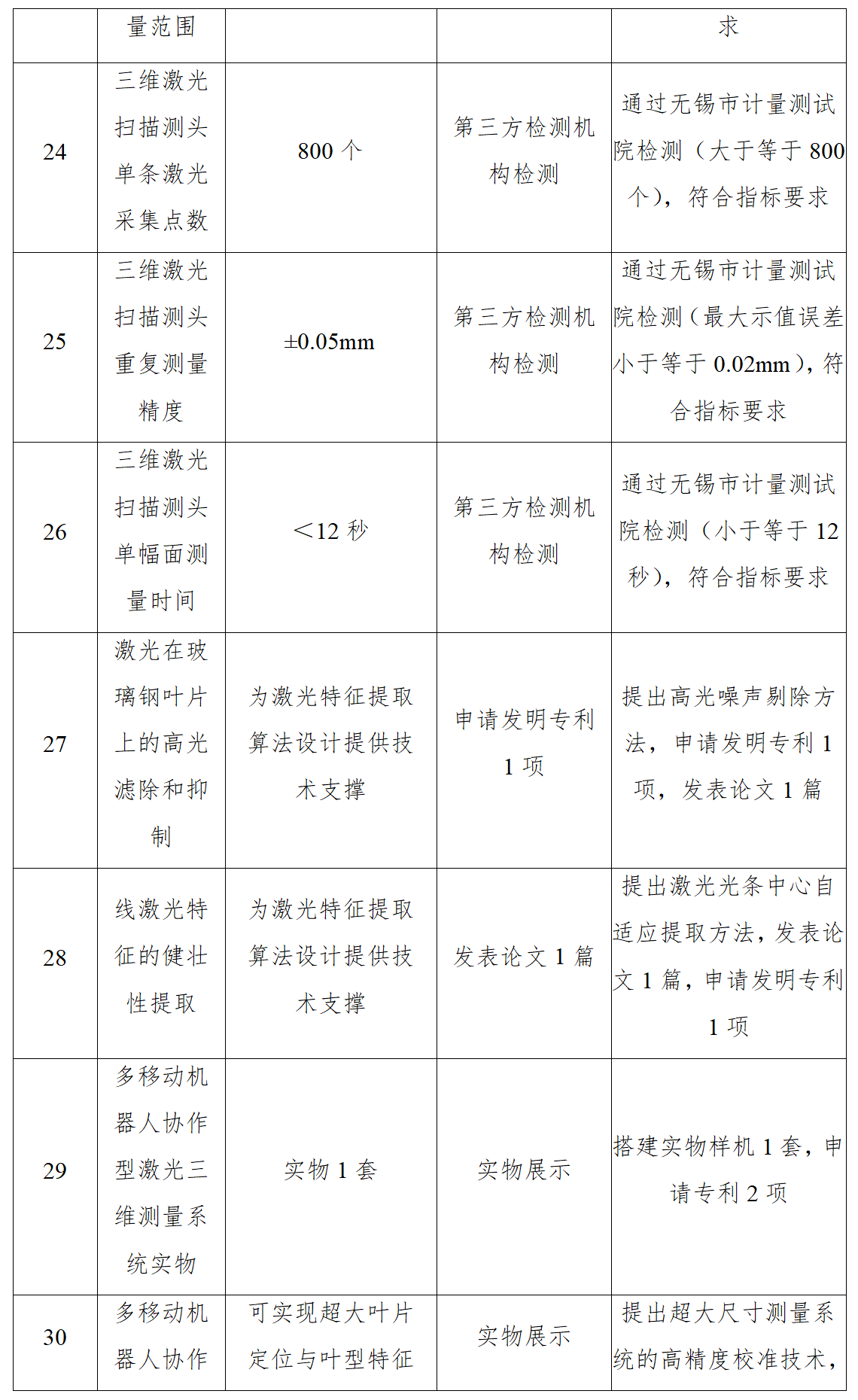
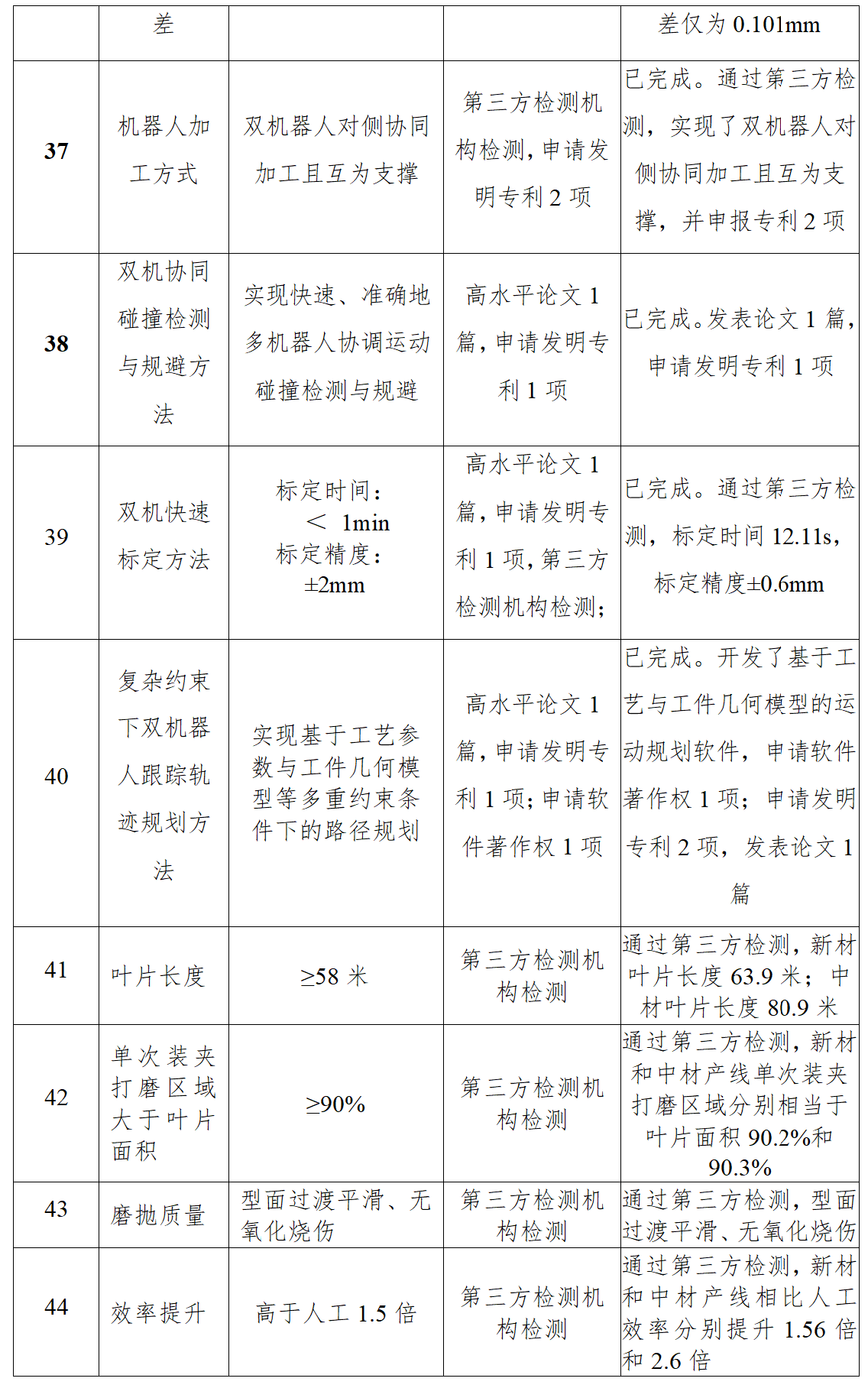
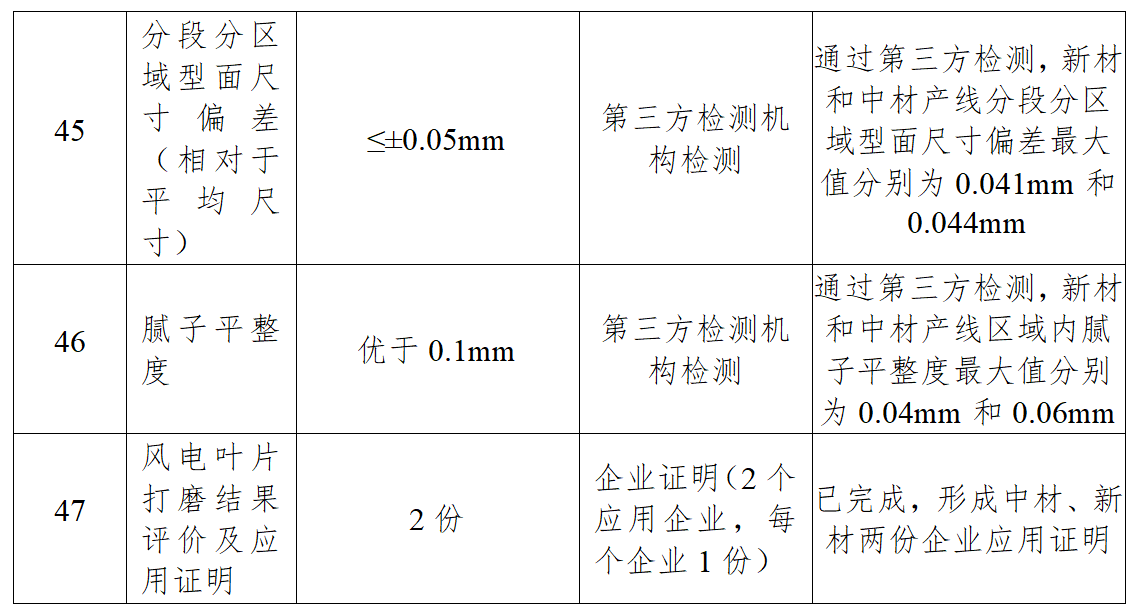
【技術指標】

打磨,是機械制造業、加工業、模具業等眾多行業中的重要工序之一。而機器人在這一制造工序中,有著極為廣闊的應用,無論是打磨、拋光,還是去毛刺,現在都可以看到機器人繁忙的身影。傳統的人工打磨作業引發的各種安全隱患以及高強度的工作特性,人工作業顯然已不適合企業的長遠發展。打磨機器人能夠保持產品的一致性、提高產品的質量和生產效率,隨著對環境保護和安全的日益重視,以及進一步提高產品質量和生產效率的要求,打磨機器人也受到前所未有的關注。
本項目成果研究目前處于可量產階段。
本研發成果對于實現大型復雜曲面的順應性力控磨拋具有重要的應用價值。所研發的柔性磨拋法蘭具有柔性好、曲面順應性強、力控精準等優勢,將力控制與位置控制解耦,更加方便在封閉式的商業工業機器人上進行推廣,而無需對機器人底層進行開發和編程,因此,可以在大型復雜曲面零件的磨拋加工中得到大量應用。較之傳統人工加工方式,機器人柔性法蘭磨拋方式最大限度地減少了粉塵對操作工人身體傷害,有效減少職業病的發病人數,具有明顯的社會效益。

掃碼關注,查看更多科技成果