





- 74 高校采購信息
- 3295 科技成果項目
- 0 創新創業項目
- 0 高校項目需求
大型水動力裝備在位機器人加工關鍵技術及其應用


重大裝備是制造強國戰略的重點,水輪機、艦船推進器等大型水動力裝備是重中之重。隨著對單機容量和能量轉換效率需求持續增長,大型水動力裝備重量尺寸大、加工空間受限、精度一致性要求高等特征的出現,給加工方式帶來了新的要求與挑戰。“數控加工”存在結構與位置形式固定、加工覆蓋區域有限、可達性低等問題;“人工加工”雖具備靈活性,但存在勞動強度大、工作環境惡劣、加工精度一致性差等問題。
機器人在位加工具有大行程、高柔性和快響應等優點,可有效解決現有大型水動力裝備“數控加工”和“人工加工”存在的受限空間復雜曲面加工區域小、柔性差、響應慢和精度一致性差等問題。但亟待突破受限空間加工軌跡規劃、多階模態加工過程控制、敏捷加工可重構裝備等關鍵難題,以實現大型水動力裝備在位高精高效敏捷加工。
本成果從受限空間高精加工軌跡規劃、多階模態高效加工過程控制、人機協同敏捷加工工藝裝備三個方面開展研究,提出了機器人“加工剛度-力致誤差”評價指標,發明了基于排斥勢場的軌跡規劃方法,研發了機器人加工多約束規劃、視覺跟蹤測量與誤差在線補償等軟硬件模塊,提出了“顫振穩定性-切觸面積”高效加工優化新方法,研發了加工余量、切削負載自適應調控系統,提出了“操作經驗知識遷移-知識驅動可制造性分析”工藝規劃新技術,發明了國際首臺(套)大型水動力裝備在位機器人加工可重構裝備,研發了大型水動力裝備機器人化全流程加工產線,實現多種水輪機轉輪和推進器葉片加工效率提升30%以上,水輪機局部加工精度最高可達±0.1mm。
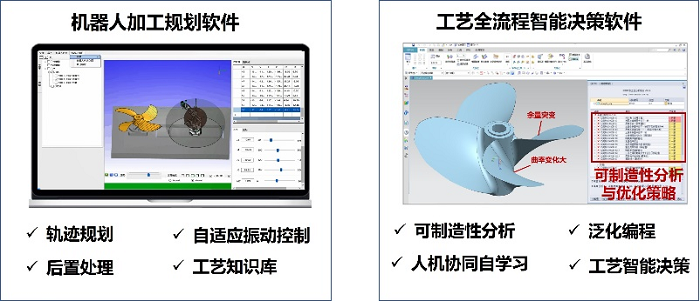
圖1 機器人加工軟件
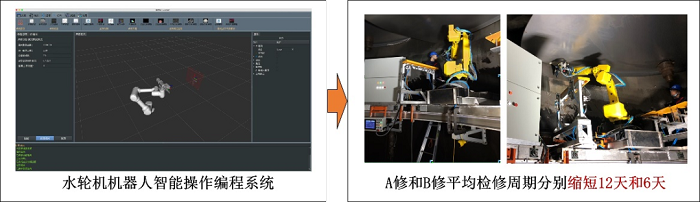
圖2 大型水輪機轉輪的機器人在位修復加工系統
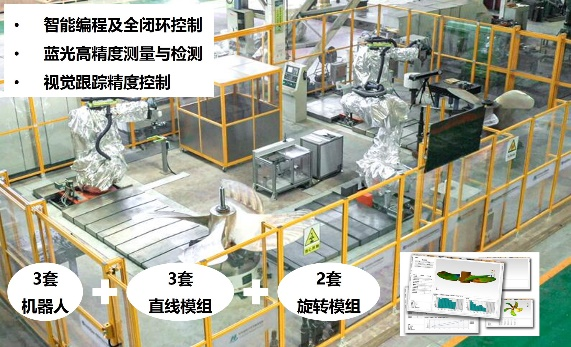
圖3 大型艦船用螺旋槳機器人在位加工系統
應用于長江電力三峽和葛洲壩電站的水輪機轉輪在位銑磨修復加工,應用于鎮江同舟螺旋槳公司的大型艦船用螺旋槳葉片銑削加工。
本成果處于已有樣機階段。
現有的方式主要為“數控加工”和人工打磨的方式,“數控加工”存在結構與位置形式固定、加工覆蓋區域有限、可達性低等問題;“人工加工”雖具備靈活性,但存在勞動強度大、工作環境惡劣、加工精度一致性差等問題。機器人在位加工具有大行程、高柔性和快響應等優點,可有效解決現有大型水動力裝備“數控加工”和“人工加工”存在的受限空間復雜曲面加工區域小、柔性差、響應慢和精度一致性差等問題。

掃碼關注,查看更多科技成果