高等教育領域數字化綜合服務平臺






華南理工大學
教育部
- 139 高校采購信息
- 106 科技成果項目
- 0 創新創業項目
- 0 高校項目需求
輕量化6自由度工業機器人
2021-05-11 15:57:23
云上高博會
http://www.gxf2npi.xyz
關鍵詞:
自由度工業機器人


所屬領域:
項目成果/簡介:
該項目通過鋁合金壓鑄、鋁/鋼復合壓鑄、伺服電機高效相變熱控等方法,實現機械臂、減速機與伺服電機等工業機器人成套的變革性輕量化技術突破;研發高性能控制系統,實現具有動力學特征的智能運動控制關鍵技術;項目采用制造工藝及控制系統自主開發,高度可控,將降低工業機器人的應用成本,提升我國工業機器人產業的整體技術水平及產業競爭力。
在前期研究中已獲得工業機器人關鍵部件相關專利授權20余項,獲得廣東省科技計劃多個項目支持及國家重點研發計劃“智能機器人專項”立項:工業機器人整機性能提升與驗證,并已建成廣東省功能結構與器件智能制造工程實驗室、廣東省節能與新能源綠色制造工程技術研究中心等平臺。
該項目具有低成本輕量化特征的核心部件及其規模制造技術;具有動力學特征的智能運動控制關鍵技術。在廣東省兩項重大戰略專項支持下,已成功開發出精密RV減速機、相變熱控伺服電機、仿生輕量化機械臂等產品。

自主研發減速機核心零部件
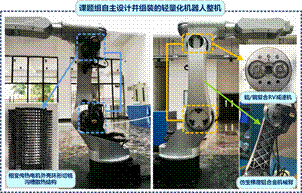
自主設計并組裝的輕量化機器人整機
知識產權類型:
技術先進程度:
成果獲得方式:
獲得政府支持情況:

掃碼關注,查看更多科技成果
取消
確定