





- 0 高校采購信息
- 6 科技成果項目
- 0 創新創業項目
- 0 高校項目需求
一種復合型無人潛水器


技術分析(創新性、先進性、獨占性)
傳統水下機器人主要有兩大類:一種是無人有纜機器人,由于其受纜限制,通常用于定點取樣和觀察,探測距離有限;第二種是無人無纜機器人,主要用于長距離測繪作業,無法進行定點作業。
目前,上述兩種機器人都有較為成熟的應用和商業產品。本項目提出的是一種復合型無人潛水器,綜合了兩種機器人優點,既可實現定點作業,又可進行長距離探測和測繪作業。目前,國際上僅美國有所研制,國內僅2家單位在研制,包括上海海洋大學。
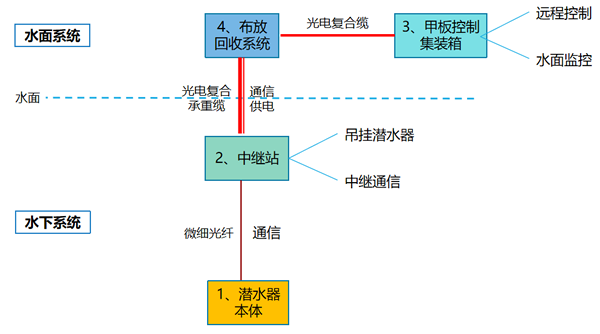
本項目由一個潛水器本體、一個中繼站、一個綜合控制系統和一套布放與回收系統四部分組成。各部分之間通過線纜連接構成完整的無人潛水器系統。
已研制復合型無人潛水器兩臺,其中第二臺設備國產化率在90%以上;

本裝置研制的初衷是用于全海深無人潛水器,但工程應用不僅限于此:
長距離隧洞和引水洞檢測,可進行5km以上檢測作業,突破現有技術瓶頸;
核電站涵洞檢測;
海上作業應用;
前述第一種和第二種機器人作業的基本能力;
目前應用狀態
上海海洋大學深淵中心研制的第一代和第二代全海深復合型無人潛水器已完成研制和全部試驗工作,分別于2015年10月,2016年12月~2017年1月,2020年7月和2020年12月開展了海試,第二代全海深作業型復合無人潛水器完成南海和馬里亞納海溝測試,實現潛水器深海近底巡航、布放標志物以及定點沉積物取樣等作業功能,最大深度6347米。海試作業已完成,下一步,是配合工程應用需求的改造作業。
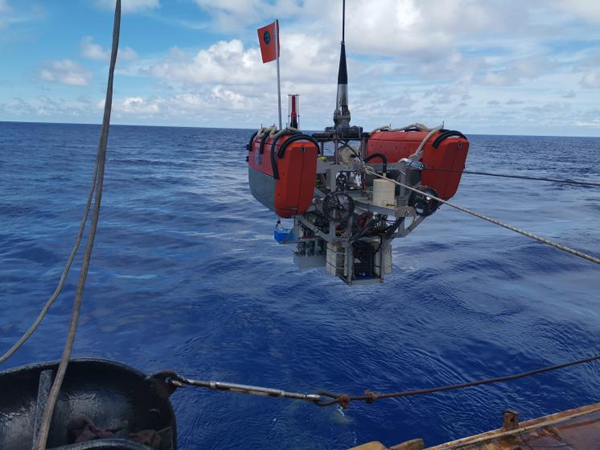
海上布放照片
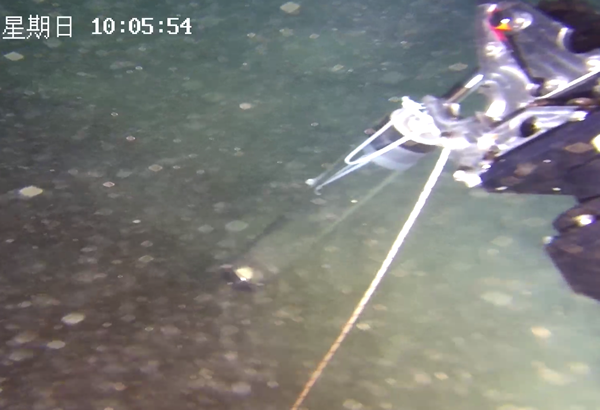
海底取樣照片

海底生物照片
前景及經濟社會效益分析等
目前該設備已初步具備各類工程環境應用的技術條件,稍加改造就可能實現工程應用。特別是該機器人特殊的作業能力,解決了現有機器人無法實現的功能,對于我們國家各類隧道、涵洞等長距離檢測作業,突破了卡脖子的技術瓶頸,具有廣闊前景。

掃碼關注,查看更多科技成果