





近日,中國科學技術大學工程科學學院、人形機器人研究院李木軍副教授、張世武教授等提出了一種模塊化設計方法,利用多模態單元實現具有復雜變形和豐富功能的磁控軟體驅動器的快速設計,拓展了硬磁性軟材料在機器人、流體系統、微細操作中的應用。成果以“Annelids-Inspired Modular Design of Multi-Modal Deformation for Magnetic Soft Robots”為題發表在國際期刊《先進功能材料》上。
磁驅動軟機器人因其無線可控性、快速響應性和生物安全性在生物醫學、機器人和仿生學中得到廣泛應用。然而,由于軟材料變形的高度非線性和極大自由度,軟體機器人的變形和運動控制一直是一個挑戰。研究團隊受蚯蚓等環節動物的節結構啟發,提出了一種具有多模態變形的磁驅動單元,單元集成了收縮、彎曲、扭轉、體積變化等多種變形模式,不同變形模式的單元可由同一勻強磁場驅動,從而實現了磁性軟材料的簡便編程設計,成功解決了磁控軟機器人的逆變形設計問題。該工作提出的模塊集成設計策略具有多功能性和便利性,推動了硬磁性軟材料在智能和集成機械系統中的應用。
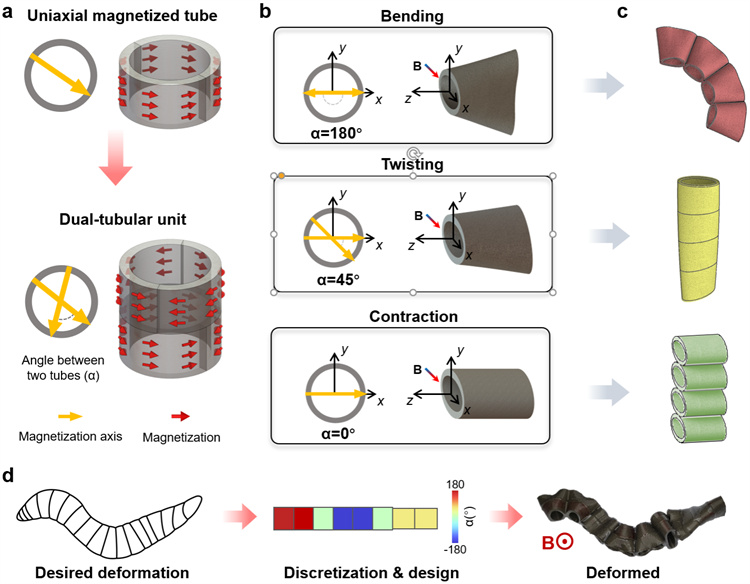
圖1:磁控軟驅動器的模塊化單元集成設計
該設計方法實現了磁控軟機器人的多場景應用,包括順應性柔性抓取、軟體機器人、流體系統等,拓展了磁控軟機器人的應用潛力。研究團隊使用收縮模態單元設計了無繩驅動的爬行機器人,可實現速度和方向可控的爬行運動。此外還利用收縮模態單元設計了磁控軟泵,避免了傳統機械泵的磨損和銹蝕問題,且與電控系統隔離從而避免了在潮濕環境下使用的漏電等危險。利用彎曲模態單元設計的磁控軟抓手,具有很強的形狀適應性,能夠輕松抓取蒲公英、生鵪鶉蛋、鮮花、薯片等脆弱和易變形物體。而利用扭轉單元設計的扭轉機構,則可以在彎曲狹窄的管道里拆卸螺釘。此外,研究團隊還將不同變形模態的單元集成到一個流體系統中,實現泵送、攪拌、輸出選擇的協同工作。最后,研究團隊還可將單元尺寸縮小到微米級,利用收縮和彎曲單元設計了毫米級的磁控鉤爪,可深入窄縫中勾取掉落的物品。

圖2:模塊化磁控軟驅動器的多場景應用
以上工作得到了科技部國家重點研發計劃,安徽省自然科學基金,“科大新醫學”聯合基金支持。中國科學技術大學精密機械與精密儀器系碩士生農舒童為該論文的第一作者,中國科學技術大學李木軍副教授、張世武教授、孫宇軒博士后為該論文通訊作者。