





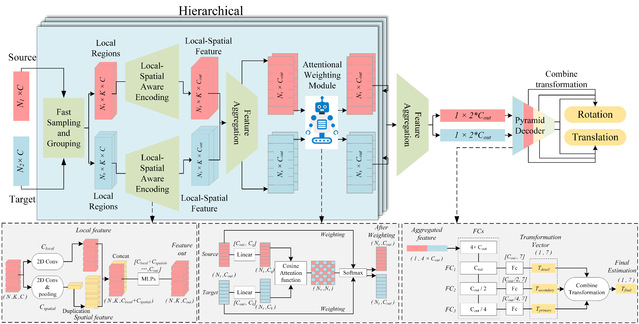
深度實時配準網絡(DDRNet)結構圖

點云深度濾波網絡(Fore-Net)結構圖

基于移動端的多模態信息視覺定位

團隊參與的國家重點研發計劃“室內混合智能定位與室內GIS技術”項目冬奧場館示范
近期,遙感與空間信息領域頂級期刊ISPRS Journal of Photogrammetry and Remote sensing(JCR一區,中科院Top期刊,2021年影響因子為8.979)連續發表環境與測繪學院陳國良教授課題組在視覺與空間數據智能處理方向的系列研究成果。
其中,“DDRNet: Fast point cloud registration network for large-scale scenes”一文面向海量點云數據配準問題,提出了一個實時化的點云配準網絡。該網絡不僅能夠為數據量較大的場景點云提供實時準確的良好配準結果,且能在低場景重疊度、點云噪聲及點云稀疏性等因素的影響下保持魯棒。研究結果對自動駕駛、機器人自主導航等領域具有一定的應用價值與意義。該論文以中國礦業大學為第一單位,張正華博士生為第一作者,陳國良教授為通訊作者,束明聰博士生、王軒碩士生為共同作者。
“Fore-Net: Efficient inlier estimation network for large-scale indoor scenario”一文面向復雜室內空間環境對點云數據質量的影響,提出了一個實時化的點云濾波網絡。該網絡不僅可以有效優化原始點云的數據質量,且能夠在點云噪聲與點云稀疏性等因素的影響下保持算法的穩健,作為配準等后續任務的前置濾波模塊可顯著增強算法的性能,具有一定的場景泛化能力。論文以中國礦業大學為第一單位,張正華博士生為第一作者,陳國良教授為通訊作者,束明聰博士生、王軒碩士生為共同作者。
“Efficient image-based indoor localization with MEMS aid on the mobile device”一文針對室內大場景下的移動端視覺定位多模態信息耦合問題,提出一種基于內置慣性單元輔助的視覺信息匹配模型,用于實現2D視覺特征與先驗3D點云特征的精準匹配,提高異源視覺特征匹配率,可為移動端的AR/VR導航定位技術提供新思路。該論文以中國礦業大學為第一單位,束明聰博士生為第一作者,陳國良教授為通訊作者,張正華博士生為共同作者。
上述研究工作得到國家重點研發計劃“室內混合智能定位與室內GIS技術”項目、國家自然科學基金項目、中國礦業大學重大專項培育項目等資助,課題組部分成果應用于張家口雪如意冬奧場館,助力賽事期間人員與設備的調度與應急保障等服務。